DMAR Bonn
DMAR Bonn
Home
Team
Videos
Publications
Teaching
Contact
Light
Dark
Automatic
2
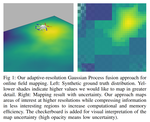
Adaptive-Resolution Field Mapping Using Gaussian Process Fusion With Integral Kernels
Unmanned aerial vehicles are rapidly gaining popularity in many environmental monitoring tasks. A prerequisite for their autonomous …
Liren Jin
,
Julius Rückin
,
Stefan Kiss
,
Teresa Vidal-Calleja
,
Marija Popović
PDF
Cite
Multi-Resolution 3D Mapping with Explicit Free Space Representation for Fast and Accurate Mobile Robot Motion Planning
With the aim of bridging the gap between high quality reconstruction and mobile robot motion planning, we propose an efficient system …
Nils Funk
,
Juan Tarrio
,
Sotiris Papatheodorou
,
Marija Popović
,
Pablo F. Alcantarilla
,
Stefan Leutenegger
PDF
Cite
Video
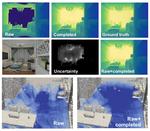
Volumetric Occupancy Mapping With Probabilistic Depth Completion for Robotic Navigation
In robotic applications, a key requirement for safe and efficient motion planning is the ability to map obstacle-free space in unknown, …
Marija Popović
,
Florian Thomas
,
Sotiris Papatheodorou
,
Nils Funk
,
Teresa Vidal-Calleja
,
Stefan Leutenegger
PDF
Cite
Video
An informative path planning framework for UAV-based terrain monitoring
Unmanned aerial vehicles represent a new frontier in a wide range of monitoring and research applications. To fully leverage their …
Marija Popović
,
Teresa Vidal-Calleja
,
Gregory Hitz
,
Jen Jen Chung
,
Inkyu Sa
,
Roland Siegwart
,
Juan Nieto
PDF
Cite
Code
Video
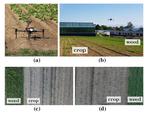
Building an Aerial-Ground Robotics System for Precision Farming: An Adaptable Solution
The application of autonomous robots in agriculture is gaining increasing popularity thanks to the high impact it may have on food …
Alberto Pretto
,
Stéphanie Aravecchia
,
Wolfram Burgard
,
Nived Chebrolu
,
Christian Dornhege
,
Tillmann Falck
,
Freya Fleckenstein
,
Alessandra Fontenla
,
Marco Imperoli
,
Raghav Khanna
,
Frank Liebisch
,
Philipp Lottes
,
Andres Milioto
,
Daniele Nardi
,
Sandro Nardi
,
Johannes Pfeifer
,
Marija Popović
,
Ciro Potena
,
Cédric Pradalier
,
Elisa Rothacker-Feder
,
Inkyu Sa
,
Alexander Schaefer
,
Roland Siegwart
,
Cyrill Stachniss
,
Achim Walter
,
Wera Winterhalter
,
Xiaolong Wu
,
Juan Nieto
PDF
Cite
Efficient Lazy Theta* Path Planning over a Sparse Grid to Explore Large 3D Volumes with a Multirotor UAV
Exploring large, unknown, and unstructured environments is challenging for Unmanned Aerial Vehicles (UAVs), but they are valuable tools …
Margarida Faria
,
Ricardo Marín
,
Marija Popović
,
Ivan Maza
,
Antidio Viguria
PDF
Cite
The ETH-MAV Team in the MBZ International Robotics Challenge
This study describes the hardware and software systems of the Micro Aerial Vehicle (MAV) platforms used by the ETH Zurich team in the …
Rik Bähnemann
,
Michael Pantic
,
Marija Popović
,
Dominik Schindler
,
Marco Tranzatto
,
Mina Kamel
,
Marius Grimm
,
Jakob Widauer
,
Roland Siegwart
,
Juan Nieto
PDF
Cite
Code
Video
WeedMap: A Large-Scale Semantic Weed Mapping Framework Using Aerial Multispectral Imaging and Deep Neural Network for Precision Farming
The ability to automatically monitor agricultural fields is an important capability in precision farming, enabling steps towards more …
Inkyu Sa
,
Marija Popović
,
Raghav Khanna
,
Zetao Chen
,
Philipp Lottes
,
Frank Liebisch
,
Juan Nieto
,
Cyrill Stachniss
,
Achim Walter
,
Roland Siegwart
PDF
Cite
Dataset
Build Your Own Visual-Inertial Drone: A Cost-Effective and Open-Source Autonomous Drone
This article describes an approach to building a cost-effective and research-grade visual-inertial (VI) odometry-aided vertical takeoff …
Inkyu Sa
,
Mina Kamel
,
Michael Burri
,
Michael Bloesch
,
Raghav Khanna
,
Marija Popović
,
Juan Nieto
,
Roland Siegwart
PDF
Cite
Code
Video
weedNet: Dense Semantic Weed Classification Using Multispectral Images and MAV for Smart Farming
Selective weed treatment is a critical step in autonomous crop management as related to crop health and yield. However, a key challenge …
Inkyu Sa
,
Zetao Chen
,
Marija Popović
,
Raghav Khanna
,
Frank Liebisch
,
Juan Nieto
,
Roland Siegwart
PDF
Cite
Code
Dataset
Cite
×