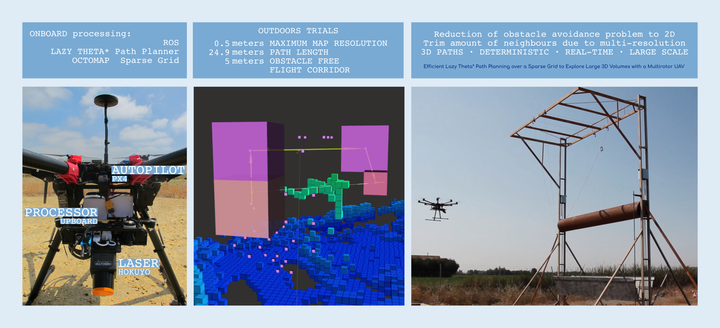
Efficient Lazy Theta* Path Planning over a Sparse Grid to Explore Large 3D Volumes with a Multirotor UAV
Abstract
Exploring large, unknown, and unstructured environments is challenging for Unmanned Aerial Vehicles (UAVs), but they are valuable tools to inspect large structures safely and efficiently. The Lazy Theta* path-planning algorithm is revisited and adapted to generate paths fast enough to be used in real time and outdoors in large 3D scenarios. In real unknown scenarios, a given minimum safety distance to the nearest obstacle or unknown space should be observed, increasing the associated obstacle detection queries, and creating a bottleneck in the path-planning algorithm. We have reduced the dimension of the problem by considering geometrical properties to speed up these computations. On the other hand, we have also applied a non-regular grid representation of the world to increase the performance of the path-planning algorithm. In particular, a sparse resolution grid in the form of an octree is used, organizing the measurements spatially, merging voxels when they are of the same state. Additionally, the number of neighbors is trimmed to match the sparse tree to reduce the number of obstacle detection queries. The development methodology adopted was Test-Driven Development (TDD) and the outcome was evaluated in real outdoors flights with a multirotor UAV. In the results, the performance shows over 90 percent decrease in overall path generation computation time. Furthermore, our approach scales well with the safety distance increases.