Dynamic System Identification, and Control for a Cost-Effective and Open-Source Multi-rotor MAV
Abstract
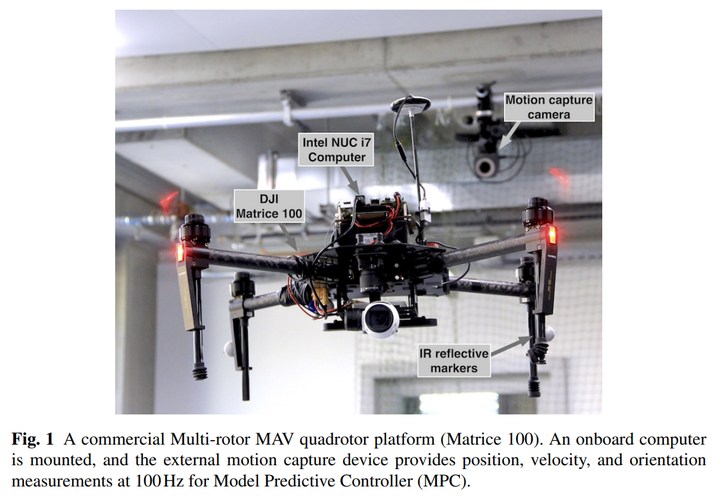
This paper describes dynamic system identification, and full control of a cost-effective Multi-rotor micro-aerial vehicle (MAV). The dynamics of the vehicle and autopilot controllers are identified using only a built-in IMU and utilized to design a subsequent model predictive controller (MPC). Experimental results for the control performance are evaluated using a motion capture system while performing hover, step responses, and trajectory following tasks in the presence of external wind disturbances. We achieve root-mean-square (RMS) errors between the reference and actual trajectory of x = 0.021 m, y = 0.016 m, z = 0.029 m, roll = 0.392 ∘, pitch = 0.618 ∘, and yaw = 1.087 ∘ while performing hover. Although we utilize accurate state estimation provided from a motion capture system in an indoor environment, the proposed method is one of the non-trivial prerequisites to build any field or service aerial robots. This paper also conveys the insights we have gained about the commercial vehicle and returned to the community through an open-source code, and documentation.