Build Your Own Visual-Inertial Drone: A Cost-Effective and Open-Source Autonomous Drone
Abstract
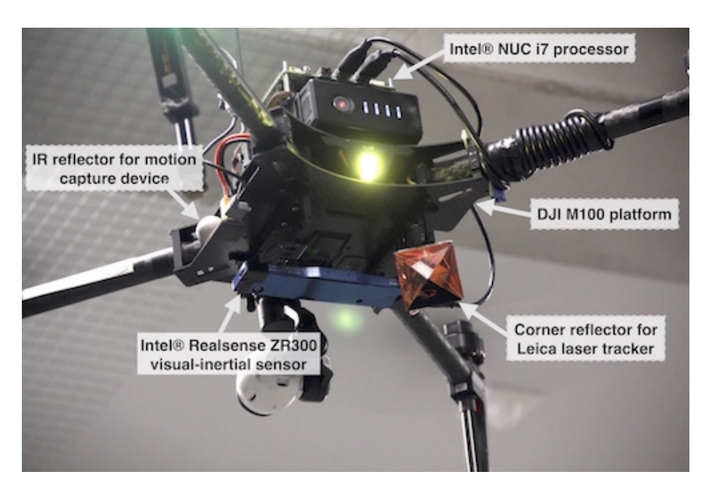
This article describes an approach to building a cost-effective and research-grade visual-inertial (VI) odometry-aided vertical takeoff and landing (VTOL) platform. We utilize an off-the-shelf VI sensor, an onboard computer, and a quadrotor platform, all of which are factory calibrated and mass produced, thereby sharing similar hardware and sensor specifications [e.g., mass, dimensions, intrinsic and extrinsic of camera-inertial measurement unit (IMU) systems, and signal-to-noise ratio]. We then perform system calibration and identification, enabling the use of our VI odometry, multisensor fusion (MSF), and model predictive control (MPC) frameworks with off-the-shelf products. This approach partially circumvents the tedious parameter-tuning procedures required to build a full system. The complete system is extensively evaluated both indoors using a motioncapture system and outdoors using a laser tracker while performing hover and step responses and trajectory-following tasks in the presence of external wind disturbances. We achieve root-mean-square (rms) pose errors of 0.036 m with respect to reference hover trajectories. We also conduct relatively long distance (.180 m) experiments on a farm site, demonstrating a 0.82% drift error of the total flight distance. This article conveys the insights we acquired about the platform and sensor module and offers open-source code with tutorial documentation to the community.