Abstract
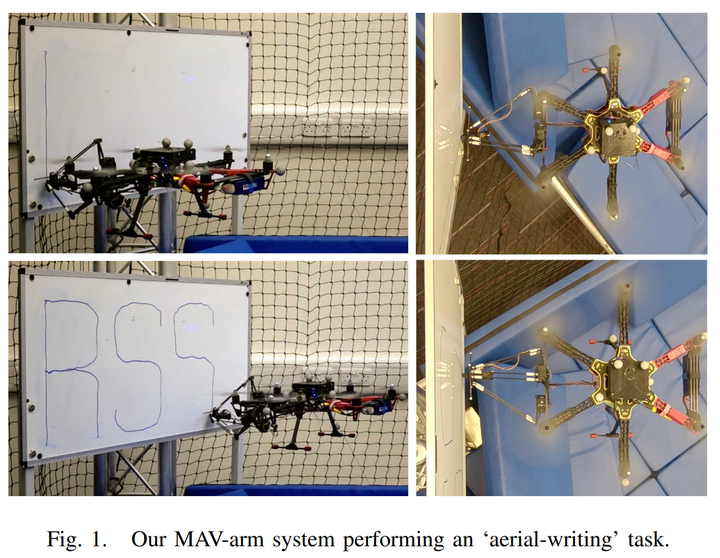
Aerial manipulation aims at combining the maneuverability of aerial vehicles with the manipulation capabilities of robotic arms. This, however, comes at the cost of the additional control complexity due to the coupling of the dynamics of the two systems. In this paper we present a Nonlinear Model Predictive Control (NMPC) specifically designed for Micro Aerial Vehicles (MAVs) equipped with a robotic arm. We formulate a hybrid control model for the combined MAV-arm system which incorporates interaction forces acting on the end effector. We explain the practical implementation of our algorithm and show extensive experimental results of our custom built system performing multiple ‘aerial-writing’ tasks on a whiteboard, revealing accuracy in the order of millimetres.